
Unified resource scheduling system for RDS robots and automated equipment
- Category:Application system
- Application field:
Path conflict rescheduling
When path conflicts occur during the handling of product materials, traffic control can be implemented for the robot product goods within the system to resolve the conflicts
Global path optimal distribution
Achieve the least transportation capacity, travel the shortest distance, spend the least cost, go through the fewest links, and deliver goods to the designated production links at the fastest speed

Dynamic buffer scheduling
To prevent the interruption of work-in-progress material supply, buffer zones are dynamically established for production equipment far from the work-in-progress material inlet to ensure the timely supply and balanced distribution of work-in-progress materials
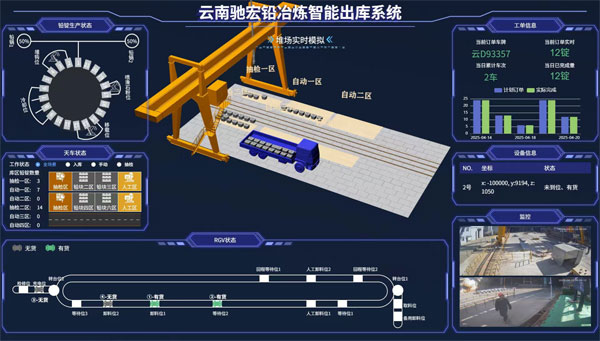
Cluster scheduling
Support the simultaneous scheduling capability of multiple robots. The entire workshop status is presented through an electronic map, and all the status, parameters and alarm information of the production equipment are displayed in real time and dynamically


